在日常生活中,倒一杯水或撿起掉在地上的布偶對人類來說再簡單不過。但對於機器人,這些行動卻極為複雜。至今,多數產業仍只讓機器人在結構化的環境中從事可重複的任務,如 google ai 機器人的基本操作。
隨著 Google DeepMind 對人工智慧機器人應用的深入研究,機器人技術有了新的突破。Google DeepMind 最新研發技術發表了他們的最新視覺-語言-行動模型(vision-language-action,VLA)——RT-2(Robotic Transformer 2)。這款 GOOGLE AI 模型能從網路和機器人資料中學習,並將這些知識轉化成控制機器人的通用指令,有助於機器人更好地理解和執行人類的指令。
Google 人工智能引進 VLA,助新系統從網路中學習
《TechCrunch》報導,RT-2 是基於 Google DeepMind 去年發表的 RT-1 系統優化版。團隊蒐集了大量的機器人數據,包括 13 個機器人在 13 萬個場景中執行的 700 多種任務,進行訓練。接著,他們引入了 VLA,結合了大型語言模型 Google Bard 等網路資料,進一步優化和訓練 RT-2。
AI 機器人可辨識什麼是垃圾、判斷疲倦該喝能量飲
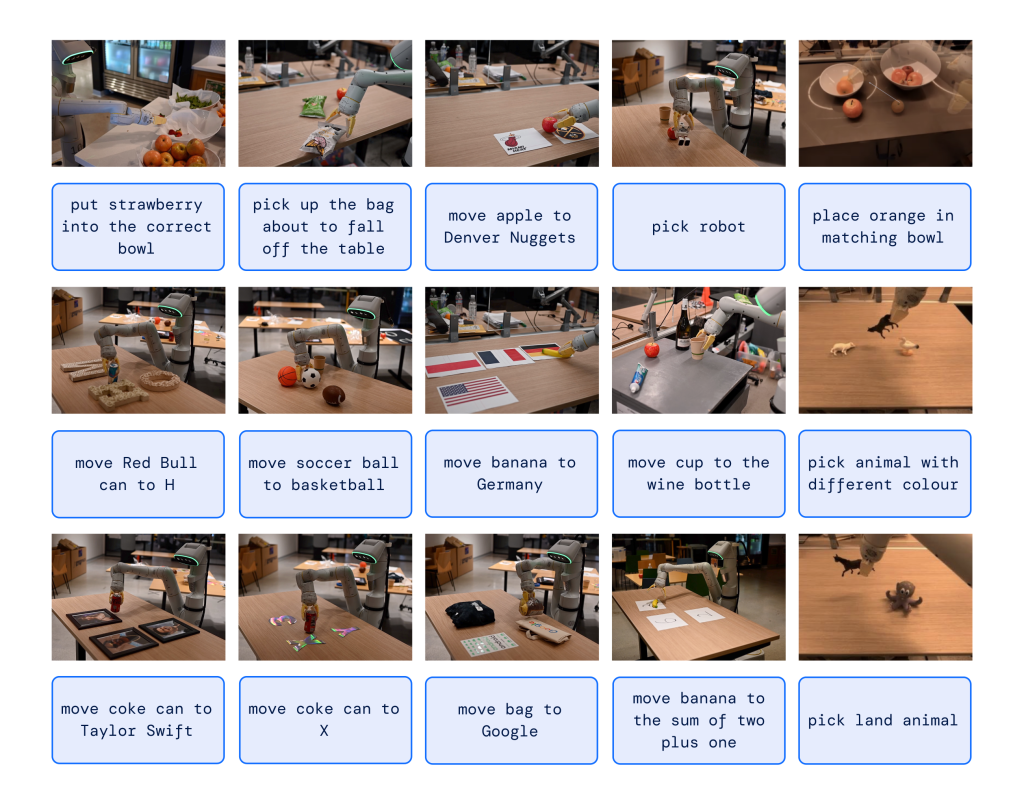
(來源:Google DeepMind)
有了更多元的訓練數據,RT-2 不再只是執行簡單的動作。它可以從網路或其他機器人數據中學到知識,並在不同場景中進行基本的推理。例如,它可以辨識香蕉皮和吃完的洋芋片包裝袋都是垃圾,或者知道疲倦的人應該喝能量飲料。
訂閱《AI TOgether》趨勢週報
每週幫你精選 AI 主題報導

感謝訂閱!隨時注意信箱的最新資訊
Google DeepMind 也進行了 RT-1 和 RT-2 的效能比較。在未曾見過的場景下,RT-2 效能提高到了62%,而 RT-1 只有 32%。這顯示 RT-2 在指令理解和訓練能力上都有了明顯的進展。
不過,RT-2 還有待完善。《The Verge》報導,在機器人測試現場,RT-2 仍然會錯誤辨識汽水口味,或將水果誤認為是白色的物體。但無疑的是,隨著 Google DeepMind 在人工智慧機器人應用上的持續研究,未來 google 人工智慧如何改變日常生活應用將變得更加廣泛。
*本文開放夥伴轉載,資料來源:《Google DeepMind》、《TechCrunch》、《The Verge》,首圖來源:Google DeepMind
(責任編輯:黃俊誠)