


機械手在工程設計中的角色幾乎被預設為「機械手臂的末端」,它的任務是在既定的關節與可達範圍內完成抓取與操作,而真正的行動能力始終掌握在手臂與底座之上。然而,近期研究提出了一種可拆卸、可自行爬行的多指機械手,正在動搖這個長期未被質疑的機械手臂結構假設。這項設計來自瑞士洛桑聯邦理工學院(EPFL)研究團隊,並已發表於《Nature Communications》。
當「機器手」不再必須依附於「機器臂」,機器人操作的尺度、彈性與想像邊界則有機會重新被打開。
機械手第一次脫離手臂,自己成為行動單位
這種新型機械手最關鍵的轉變,在於它不再只是被動的操作端點,而是一個能夠獨立行動的裝置。它可以從原本的機械手臂上脫離,落地後以多指協調的方式自行爬行,主動接近目標物,再完成抓取、搬運甚至回程。等於過去必須透過整支手臂反覆調整姿態、角度與位置才能完成的操作,如今可以交由「手本身」處理。
研究團隊特別說明,這種機械手並不是為了監控、潛行或任何隱蔽用途而設計,而是直接對準管道檢修、設備內部取物與狹小空間操作等實際工程需求,解決傳統機械手進不去、夠不到、轉不開的問題。
若說行動能力的獨立化,是對機械手定位的顛覆,那麼在結構設計上,這類機械手則直接挑戰了「人手是靈巧度上限」的默認前提。
不再需要「拇指」,對稱結構打破人手限制
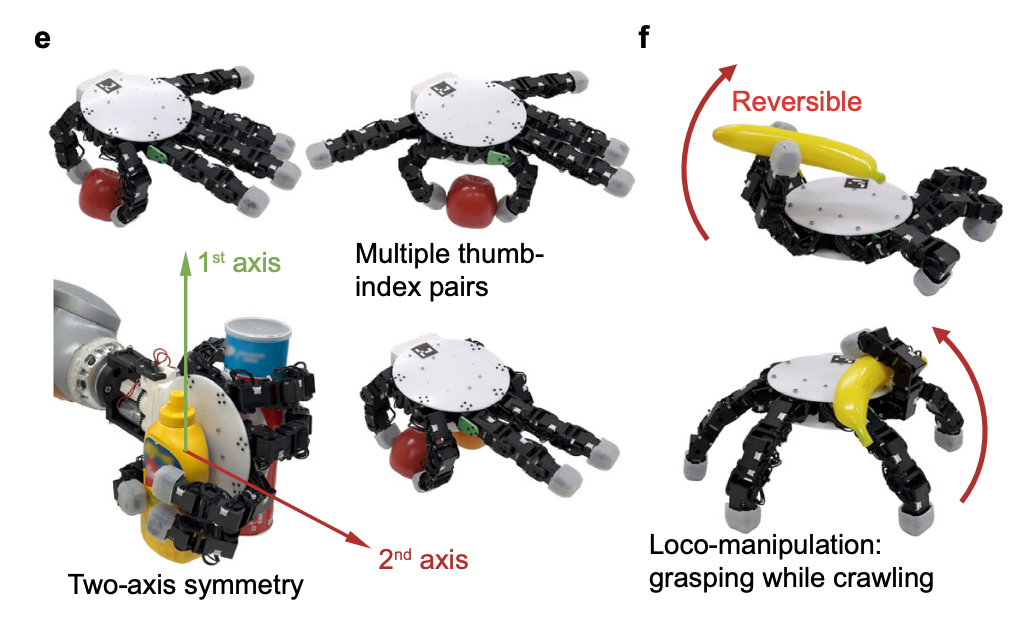
人類之所以能完成精細操作,核心在於拇指與其他手指形成的對向抓握關係,但這種能力本身其實高度依賴非對稱結構,也因此形成隱性的限制。這種新型機械手採取完全對稱的設計,每一根手指都具備雙向彎折能力,任意兩指之間都可以構成穩定的對握關係,不再需要仰賴單一「拇指角色」。
更進一步的是,這些手指不只可以向前抓取,也能在手掌背面完成反向抓握,使機械手得以在不翻轉的情況下,同時處理前後兩側的物體。在雜亂、狹小或高度受限的環境中,這種可逆性大幅降低了操作所需的動作成本。
實驗顯示,這樣的結構讓機械手能夠一次抓取多個物件,甚至完成原本需要雙手協作的任務,例如同時固定目標物並操作工具,或在爬行過程中逐一回收散落物品。
把「可作業空間」從手臂末端,變成整個環境
這些能力直接轉化為工業與維修場景中的實際價值。在管線內部、機械腔體、設備背面等人類難以進入、傳統機械手臂又受限於關節半徑的場域中,一個能脫離母體、自行移動並操作的機械手,等於將「可作業空間」從手臂的末端,擴展為整個可抵達的平面或立體結構。
可以設想,當它與自動駕駛載具或四足機器人結合時,前者負責長距離移動與定位,後者則負責最後一段精細操作,整個系統的效率與安全性都顯著提升。
在很多工業場景裡,真正困難的是最後那一點點操作距離。例如管線內部、設備殼體裡、機械背面、縫隙深處,這些地方有三個共同特徵:
第一,人不適合進去:空間狹小、有高溫、有化學物質、有旋轉零件,派工程師下去風險高、成本也高 ;
第二,大型機械手臂也不適合:機械手臂雖然精準,但它需要空間來轉身。為了讓末端對準一顆螺絲或一個異物,整支手臂常常要反覆調整角度、姿態、關節配置,動作慢、能耗高,還容易碰撞 ;
第三,實際要做的事往往很小:可能只是撿一個掉進去的零件、轉一下鬆動的螺帽、確認某個位置有沒有卡異物,並不值得動用一整套重型系統。
這時候,可自行爬行、可獨立操作的機械手就剛好卡在一個很精準的位置。
我們或許過於執著於模仿人手
而這項研究的影響並不僅止於工業自動化。它同時對「機器人手」與「義肢」的未來發展,提出了很本質的問題,即我們是否過度執著於模仿人手本身?
機器人手的目標未必是複製人類,而是超越人類在特定任務下的功能表現。對義肢而言,這意味著未來的設計方向,可能不再以外觀或解剖結構的相似性為優先,而是追求使用者在特定環境中能完成更多事。
研究也暗示,靈巧度不再只是「手指有多精細」,而是移動能力、抓取能力與環境互動是否被整合為一個系統。
這類可拆卸、可爬行的多指機械手,也凸顯機器人設計正從單一構件邏輯,走向模組化與自主化的方向。當機械手不再受限於手臂的位置,工業自動化的操作半徑與彈性被大幅拉開,人類手的結構也不再是設計的終點。
從工業應用到義肢技術,瑞士洛桑聯邦理工學院的研究正在重新定義何謂「靈巧」,也迫使工程界重新思考,什麼樣的手才真正適合未來的工作環境。
【推薦閱讀】
◆ FedEx 為何不急著用人形機器人?物流巨頭點名真正需要的是「超級人形」
◆ 破解 AI 機器人「資料荒」!1X 如何將網路上無窮盡的影片,轉化為實體動作?
◆ 跨越恐怖谷:為什麼「精準對嘴」是 AI 機器人進入家庭的關鍵拼圖?
*本文開放合作夥伴轉載,參考資料:《Nature》、《FINANCIAL TIMES》,圖片來源:《Nature》
(責任編輯:鄒家彥)



